Arenstorf orbit#
In this example we would like to present some adaptive time step methods in Ponio. We do that on Arenstorf orbit problem
with initial conditon \((x,\dot{x},y,\dot{y})=(0.994, 0, 0, -2.001585106)\) and \(r_1\) and \(r_2\) done by
Ponio solves only first order derivative in time, to do that we need to rewrite our problem with the folowing vector
the system becomes
We already present the Lawson splitting into a linear and a non-linear part:
import sympy as sp
L = sp.Matrix([
[0,0,1,0],
[0,0,0,1],
[1,0,0,2],
[0,1,-2,0],
])
t = sp.symbols(r"tau",real=True)
for ev in L.eigenvals():
display(ev)
so the linear part of the Lawson splitting doesn’t blow up, this is a good property for the stability of the method.
eL = sp.exp(t*L)
display(eL)
We get an explicit form of \(e^{\tau L}\), \(\forall\tau\in\mathbb{R}\), so we don’t need to compute numerically exponential at each step. Now we can write a special exponential function to return this matrix at each step.
In Ponio, exponential function for Lawson method gets the linear part times the time step:
matrix_t exp( matrix_t const& M );
with M = c_j*dt*L. To get the time step of the stage, with this
matrix we can get M(0,2).
Eigen::Matrix<double,4,4> exp ( Eigen::Matrix<double,4,4> const& M )
{
double tau = M(0,2);
double s = std::sin(tau), c = std::cos(tau);
Eigen::Matrix<double,4,4> e;
e << tau*s+c , -tau*c+s , tau*c , tau*s ,
tau*c-s , tau*s+c , -tau*s , tau*c ,
tau*c , tau*s , -tau*s+c , tau*c+s ,
-tau*s , tau*c , -tau*c-s , -tau*s+c ;
return e;
}
We can also use SymPy to generate the code
print("""
e <<
{};
""".format(
" ,\n ".join([
" , ".join([ sp.cxxcode(eL[i,j]) for j in range(eL.cols) ])
for i in range(eL.rows)
])
))
e <<
tau*std::sin(tau) + std::cos(tau) , -tau*std::cos(tau) + std::sin(tau) , tau*std::cos(tau) , tau*std::sin(tau) ,
tau*std::cos(tau) - std::sin(tau) , tau*std::sin(tau) + std::cos(tau) , -tau*std::sin(tau) , tau*std::cos(tau) ,
tau*std::cos(tau) , tau*std::sin(tau) , -tau*std::sin(tau) + std::cos(tau) , tau*std::cos(tau) + std::sin(tau) ,
-tau*std::sin(tau) , tau*std::cos(tau) , -tau*std::cos(tau) - std::sin(tau) , -tau*std::sin(tau) + std::cos(tau);
Or for the shake of simplicity, use Eigen functions to compute exponential of a matrix:
#include <unsupported/Eigen/MatrixFunctions>
// ...
auto mexp = [](Eigen::Matrix<double,4,4> const& M){ return M.exp(); };
%system mkdir -p arenstorf_adaptivetimestep_demo
[]
%%writefile arenstorf_adaptivetimestep_demo/main.cpp
#include <iostream>
#include <numeric>
#include <ponio/problem.hpp>
#include <ponio/solver.hpp>
#include <ponio/observer.hpp>
#include <ponio/runge_kutta.hpp>
#include <ponio/eigen_linear_algebra.hpp>
#include <eigen3/Eigen/Core>
struct arenstorf_model
{
using state_t = Eigen::Matrix<double,4,1>;
using matrix_t = Eigen::Matrix<double,4,4>;
double mu;
matrix_t l; // linear part matrix
arenstorf_model(double m)
: mu(m)
{
l << 0., 0., 1., 0.,
0., 0., 0., 1.,
1., 0., 0., 2.,
0., 1.,-2., 0.;
}
double r_1 (double x, double y)
{
return std::sqrt((x+mu)*(x+mu) + y*y);
}
double r_2 (double x, double y)
{
return std::sqrt((x-1.+mu)*(x-1.+mu) + y*y);
}
void linear_part ( double /* t */, state_t const& y, state_t & dy ) const
{
double const y1 = y[0];
double const y2 = y[1];
double const y3 = y[2];
double const y4 = y[3];
dy[0] = y3;
dy[1] = y4;
dy[2] = y1 + 2 * y4;
dy[3] = y2 - 2 * y3;
}
void non_linear_part ( double /* t */, state_t const& y, state_t & dy ) const
{
double const y1 = y[0];
double const y2 = y[1];
double const y3 = y[2];
double const y4 = y[3];
double const r1 = sqrt( ( y1 + mu ) * ( y1 + mu ) + y2 * y2 );
double const r2 = sqrt( ( y1 - 1 + mu ) * ( y1 - 1 + mu ) + y2 * y2 );
dy[0] = 0.;
dy[1] = 0.;
dy[2] = - ( 1 - mu ) * ( y1 + mu ) / ( r1 * r1 * r1 ) - mu * ( y1 - 1 + mu ) / ( r2 * r2 * r2 );
dy[3] = - ( 1 - mu ) * y2 / ( r1 * r1 * r1 ) - mu * y2 / ( r2 * r2 * r2 );
}
void n ( double t, state_t const& y, state_t & dy ) const
{
non_linear_part(t, y, dy);
}
void operator () (double /* t */ , state_t const& y, state_t & dy ) const
{
double const y1 = y[0];
double const y2 = y[1];
double const y3 = y[2];
double const y4 = y[3];
double const r1 = sqrt( ( y1 + mu ) * ( y1 + mu ) + y2 * y2 );
double const r2 = sqrt( ( y1 - 1 + mu ) * ( y1 - 1 + mu ) + y2 * y2 );
dy[0] = y3;
dy[1] = y4;
dy[2] = y1 + 2 * y4 - ( 1 - mu ) * ( y1 + mu ) / ( r1 * r1 * r1 ) - mu * ( y1 - 1 + mu ) / ( r2 * r2 * r2 );
dy[3] = y2 - 2 * y3 - ( 1 - mu ) * y2 / ( r1 * r1 * r1 ) - mu * y2 / ( r2 * r2 * r2 );
}
};
Eigen::Matrix<double,4,4> mexp ( Eigen::Matrix<double,4,4> const& M )
{
double tau = M(0,2);
double s = std::sin(tau), c = std::cos(tau);
Eigen::Matrix<double,4,4> e;
e << tau*s+c , -tau*c+s , tau*c , tau*s ,
tau*c-s , tau*s+c , -tau*s , tau*c ,
tau*c , tau*s , -tau*s+c , tau*c+s ,
-tau*s , tau*c , -tau*c-s , -tau*s+c ;
return e;
}
int main()
{
using state_t = Eigen::Matrix<double,4,1>;
using namespace ponio::observer;
double mu = 0.012277471;
auto A = arenstorf_model(mu);
auto arenstorf_pb = A;
state_t yini = { 0.994, 0., 0., -2.00158510637908252240537862224 };
double dt = 2e-5;
double tf = 17.0652165601579625588917206249;
double tol = 5e-6;
ponio::solve(arenstorf_pb, ponio::runge_kutta::rk_118(tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_rk_118_ref.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::rk54_6m(tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_rk56_6m.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::rk54_7m(tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_rk56_7m.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::rk54_7s(tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_rk56_7s.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::rk87_13m(tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_rk87_13m.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::lrk54_6m(mexp,tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_lrk56_6m.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::lrk54_7m(mexp,tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_lrk56_7m.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::lrk54_7s(mexp,tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_lrk56_7s.txt"_fobs);
ponio::solve(arenstorf_pb, ponio::runge_kutta::lrk87_13m(mexp,tol), yini, {0.,tf}, dt, "arenstorf_adaptivetimestep_demo/orbit_lrk87_13m.txt"_fobs);
return 0;
}
Writing arenstorf_adaptivetimestep_demo/main.cpp
%system $CXX -std=c++20 -I ../include -I ${CONDA_PREFIX}/include arenstorf_adaptivetimestep_demo/main.cpp -o arenstorf_adaptivetimestep_demo/main
[]
%system ./arenstorf_adaptivetimestep_demo/main
[]
import numpy as np
import matplotlib.pyplot as plt
meths = {
"rk56_6m": "RK(5,6) 6m",
"rk56_7m": "RK(5,6) 7m",
"rk56_7s": "RK(5,6) 7s",
"rk87_13m": "RK(8,7) 13m",
"lrk56_6m": "LRK(5,6) 6m",
"lrk56_7m": "LRK(5,6) 7m",
"lrk56_7s": "LRK(5,6) 7s",
"lrk87_13m": "LRK(8,7) 13m"
}
for tag,name in meths.items():
data = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_{}.txt".format(tag))
t = data[:,0]
x = data[:,1]
y = data[:,2]
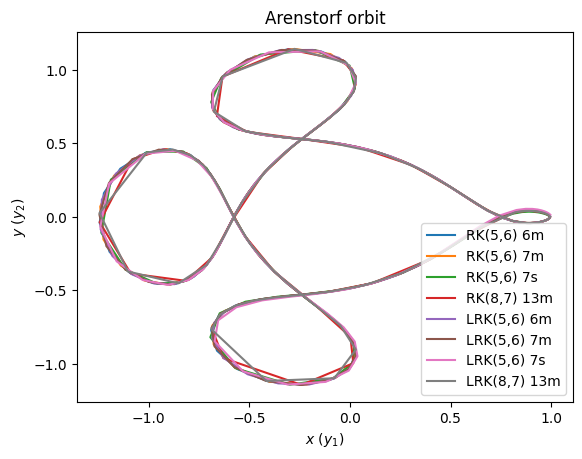
plt.plot(x,y,label=name)
plt.title("Arenstorf orbit")
plt.xlabel("$x$ ($y_1$)")
plt.ylabel("$y$ ($y_2$)")
plt.legend()
plt.show()
for tag,name in meths.items():
data = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_{}.txt".format(tag))
t = data[:,0]
u = data[:,3]
v = data[:,4]
plt.plot(u,v,label=name)
plt.title("Velocity")
plt.xlabel("$\\dot{{x}}$ ($y_3$)")
plt.ylabel("$\\dot{{y}}$ ($y_4$)")
plt.legend()
plt.show()
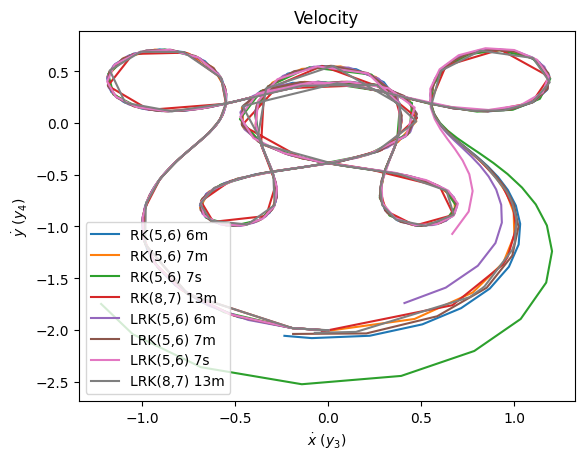
Since \(y_1\) and \(y_2\) are linear in the solved problem, we observe fewer differences, contrary to the speed. The exact solution is a closed orbit (so near to the orange curve done by RK(5,6) 7m method).
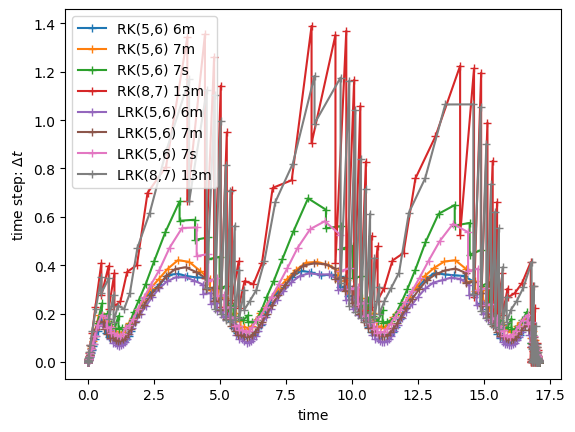
Ponio save also the time step of each iteration (even failed iterations).
for tag,name in meths.items():
data = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_{}.txt".format(tag))
t = data[:,0]
dt = data[:,-1]
plt.plot(t,dt,"+-",label=name)
plt.xlabel("time")
plt.ylabel("time step: $\\Delta t$")
plt.legend()
plt.show()
from scipy.interpolate import interp1d
data_ref = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_rk_118_ref.txt")
t_ref = data_ref[:,0]
x_ref = data_ref[:,1]
y_ref = data_ref[:,2]
u_ref = data_ref[:,3]
v_ref = data_ref[:,4]
fx = interp1d(t_ref,x_ref,kind='cubic')
fy = interp1d(t_ref,y_ref,kind='cubic')
fu = interp1d(t_ref,u_ref,kind='cubic')
fv = interp1d(t_ref,v_ref,kind='cubic')
def error(u,v):
return np.sqrt(np.square(u-v))/len(u)
fig, axs = plt.subplots(2, 1)
for tag,name in meths.items():
data = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_{}.txt".format(tag))
t = data[:,0]
x = data[:,1]
y = data[:,2]
u = data[:,3]
v = data[:,4]
axs[0].plot(t,error(x,fx(t)) + error(y,fy(t)),"+-",label=name)
axs[1].plot(t,error(u,fu(t)) + error(v,fv(t)),"+-",label=name)
axs[0].set_ylabel("error on position")
axs[1].set_yscale('log')
axs[1].set_xlabel("time")
axs[1].set_ylabel("error on velocity")
axs[0].legend()
plt.show()
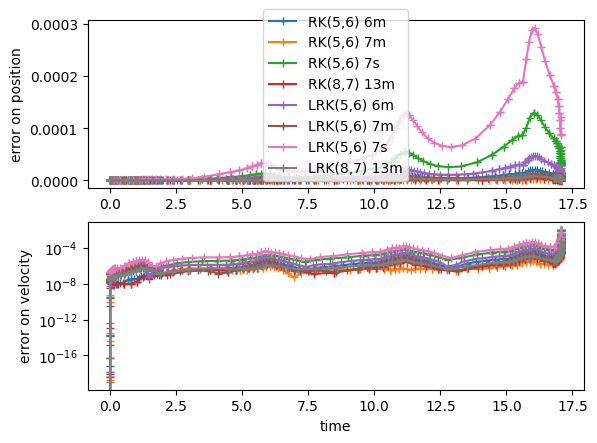
As we already see on the velocity curve, the method that done the lower error is the RK(5,6) 7m method (orange curve).
n_iters = []
n_success = []
for tag,name in meths.items():
data = np.loadtxt("arenstorf_adaptivetimestep_demo/orbit_{}.txt".format(tag))
t = data[:,0]
# number of iteration is done by length of of time but we get failed and successed iterations
n_iters.append(len(t))
# iterations where current time are equals are failed iterations
n_success.append(len(t[1:][t[:-1]-t[1:] != 0]))
n_iters = np.array(n_iters)
n_success = np.array(n_success)
min_idx = np.argmin(n_iters)
max_idx = np.argmax(n_iters)
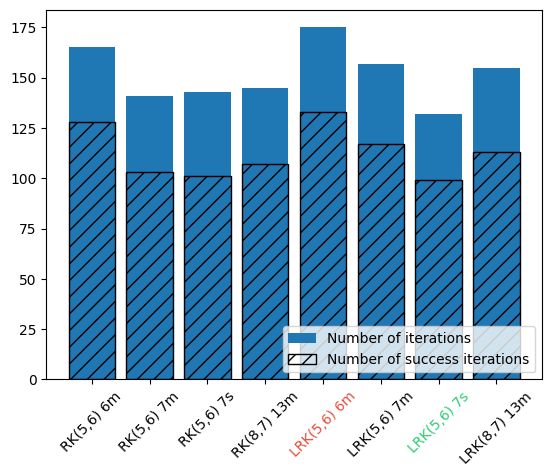
plt.bar(meths.values(),n_iters,label="Number of iterations")
plt.bar(meths.values(),n_success,fill=False, hatch='//',label="Number of success iterations")
plt.xticks()[1][min_idx].set_color("#2ecc71")
plt.xticks()[1][max_idx].set_color("#e74c3c")
plt.xticks(rotation=45)
plt.legend(loc='lower right')
plt.show()
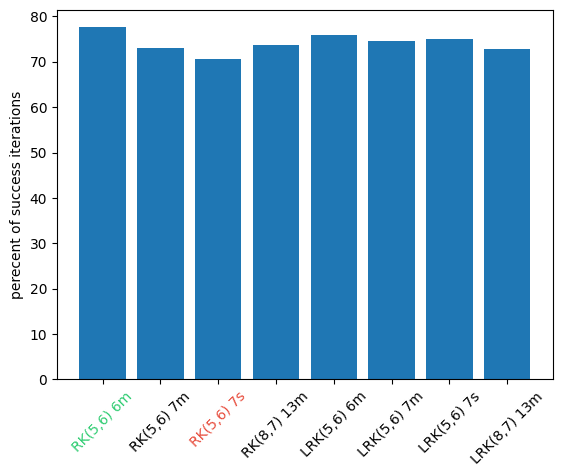
percent = 100*n_success/n_iters
min_idx = np.argmin(percent)
max_idx = np.argmax(percent)
plt.bar(meths.values(),percent)
plt.xticks()[1][min_idx].set_color("#e74c3c")
plt.xticks()[1][max_idx].set_color("#2ecc71")
plt.xticks(rotation=45)
plt.ylabel("perecent of success iterations")
plt.show()