Lotka-Volterra system with a Runge-Kutta method#
In this example we present how to write a program to solve the Lotka-Volterra equations with Ponio.
The system is definied as:
where:
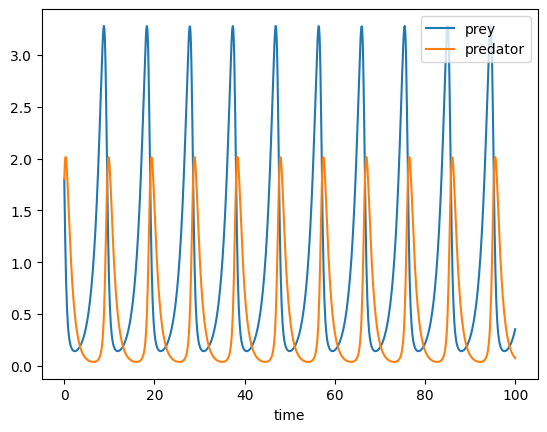
\(x\) is the number of prey
\(y\) is the number of predators
\(t\) represents time
\(\alpha\), \(\beta\), \(\gamma\) and \(\delta\) are postive real parameters describing the interaction of the two species.
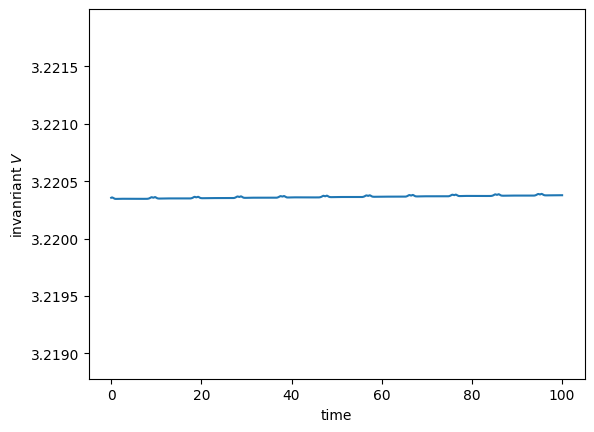
We would like to compute the invariant \(V\) definied by:
Define the state#
In Ponio is build to solve a problem defined as:
we defined as a state (or state_t) the type which represents
\(u\). In scalar problems, state_t is often double. In
system problems, state_t has multiple composants and Ponio need to
make some arithmetic operations on it, so it can be a
`std::valarray<double> <https://en.cppreference.com/w/cpp/numeric/valarray>`__
or Eigen
vector, etc.
For Lotka-Volterra we have 2 composants so we will use in this example
std::valarray<double>. We can defined this as:
using state_t = std::valarray<double>;
Define problem#
The `ponio::solve <#>`__ function take as first argument a problem.
In Ponio, a problem is a invokable object that take two arguments:
\(t\) the current time, and \(u\) the current solution. So a
problem can be:
a simple function
a lambda function
a functor
a
`ponio::problem<#>`__ (which need an invokable object)
A problem represents function \(f\) in \(\dot{u}=f(t,u)\) ODE.
We would like to change easly parameter so we will use a functor (a
class that overload () operator):
#include <valarray>
class Lotka_Volterra
{
using state_t = std::valarray<double>;
double alpha;
double beta;
double gamma;
double delta;
public:
Lotka_Volterra(double a, double b, double g, double d)
: alpha(a), beta(b), gamma(g), delta(d)
{}
state_t
operator() (double tn, state_t const& un)
{
double x = un[0], y = un[1];
double dx = alpha*x - beta*x*y;
double dy = delta*x*y - gamma*y;
return {dx,dy};
}
};
Simple example#
If we would like to save all iterations into a file we can use a
observer::file_observer, if we would like to display all into
std::cout we can use observer::cout_observer. In this example we
print all into a file.
int main()
{
using state_t = std::valarray<double>;
using namespace observer;
double alpha = 2./3., beta=4./3., gamma=1., delta=1.;
auto pb = Lotka_Volterra(alpha,beta,gamma,delta);
double dt = 0.1;
double tf = 100;
state_t u_ini = {1.8,1.8};
ponio::solve(pb, ponio::runge_kutta::rk_44<>(), u_ini, {0.,tf}, dt, "lv1.dat"_fobs);
return 0;
}
Where ponio::runge_kutta::rk_44<>() create an instance of algorithm
to solve the problem, which represent classical RK(4,4) method.
%system mkdir -p lotka_volterra_rungekutta_demo
[]
%%writefile lotka_volterra_rungekutta_demo/main.cpp
#include <iostream>
#include <valarray>
#include "ponio/solver.hpp"
#include "ponio/observer.hpp"
#include "ponio/runge_kutta.hpp"
class Lotka_Volterra
{
using state_t = std::valarray<double>;
double alpha;
double beta;
double gamma;
double delta;
public:
Lotka_Volterra(double a, double b, double g, double d)
: alpha(a), beta(b), gamma(g), delta(d)
{}
void
operator() (double tn, state_t const& un, state_t& dun)
{
double x = un[0], y = un[1];
double dx = alpha*x - beta*x*y;
double dy = delta*x*y - gamma*y;
dun[0] = dx;
dun[1] = dy;
}
};
int main()
{
using state_t = std::valarray<double>;
using namespace ponio::observer;
double alpha = 2./3., beta=4./3., gamma=1., delta=1.;
auto pb = Lotka_Volterra(alpha,beta,gamma,delta);
double dt = 0.1;
double tf = 100;
state_t u_ini = {1.8,1.8};
ponio::solve(pb, ponio::runge_kutta::rk_44(), u_ini, {0.,tf}, dt, "lotka_volterra_rungekutta_demo/rk_44.dat"_fobs);
return 0;
}
Writing lotka_volterra_rungekutta_demo/main.cpp
%system $CXX -std=c++20 -I ../include lotka_volterra_rungekutta_demo/main.cpp -o lotka_volterra_rungekutta_demo/main
[]
%system ./lotka_volterra_rungekutta_demo/main
[]
import numpy as np
import matplotlib.pyplot as plt
data = np.loadtxt("lotka_volterra_rungekutta_demo/rk_44.dat")
t = data[:,0]
x = data[:,1]
y = data[:,2]
plt.plot(t,x,label="prey")
plt.plot(t,y,label="predator")
plt.xlabel("time")
plt.legend()
plt.show()
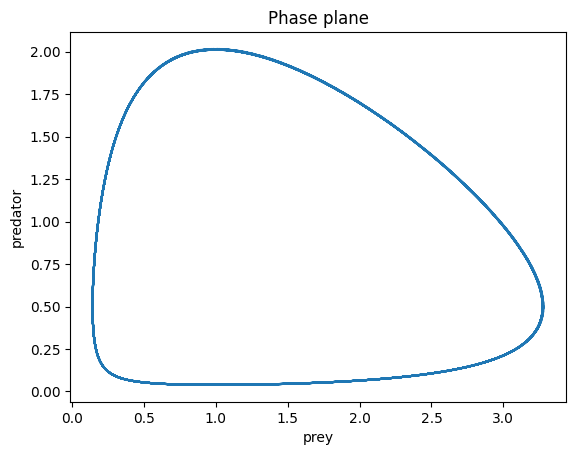
plt.plot(x,y)
plt.xlabel("prey")
plt.ylabel("predator")
plt.title("Phase plane")
plt.show()
Now define the invariant \(V\) :
def V(x,y, alpha=2./3., beta=4./3., gamma=1., delta=1.):
return delta*x - np.log(x) + beta*y - alpha*np.log(y)
plt.plot(t,V(x,y))
plt.xlabel("time")
plt.ylabel("invanriant $V$")
vmax = max(V(x,y))
plt.ylim([(1-5e-4)*vmax,(1+5e-4)*vmax])
plt.show()