Lotka-Volterra system with a Lawson method#
In this example we reuse previous definition in Lotka-Voleterra resolution with Runge-Kutta method which is the first tutorial. In this notebook we solve the same example.
The system is definied as:
where:
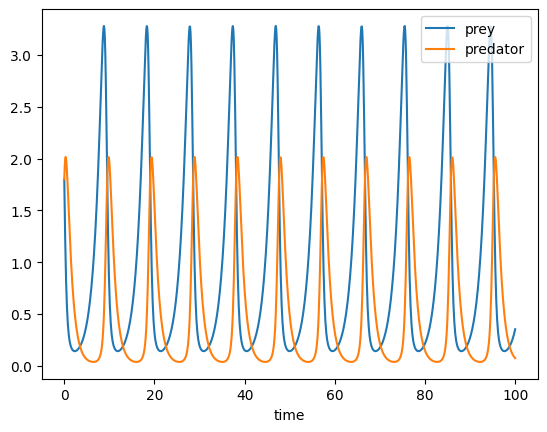
\(x\) is the number of prey
\(y\) is the number of predators
\(t\) represents time
\(\alpha\), \(\beta\), \(\gamma\) and \(\delta\) are postive real parameters describing the interaction of the two species.
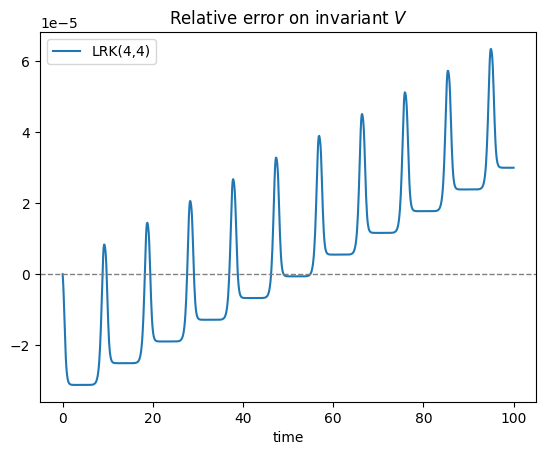
We would like to compute the invariant \(V\) definied by:
Lawson methods#
Lawson methods are a class of time integration schemes that are applied to differential equations of the form:
where \(L\) is a matric and \(N:(t,u)\mapsto N(t,u)\) is a, in general nonlinear, function of the unknow \(u\), and the time \(t\geq 0\). Lawson methods are especially efficient when applied to problems where \(L\) implies a stringent stability condition if it is treated explicitly. Solving this equation with a Lawson method relies of the following change of variable:
Plugging this into our equation yields
Now an explicit Runge-Kutta method is applied to the transformed equation. We introduce the time discretization \(t^n = n\Delta t\) with \(\Delta t>0\) the time step, \(n\in\mathbb{N}\) and \(u^n\) (respectivement \(v^n\)) denotes the numerical approximation of \(u(t^n)\) (resp. \(v(t^n)\)). For the sake of simplicity, we first present the method for the explicit Euler scheme. Applying the forward Euler method to this problem leads to
Reversing the change of variable \(u(t) = e^{tL}v(t)\) yields the following scheme for \(u^n\)
This is the Lawson-Euler method, also a method of order one. More generally, the Lawson method induced by an explicit Runge-Kutta method RK(\(s\),\(p\)) with \(s\) stages of order \(p\) can be written as:
Here, we defined the following linear and non linear part:
Ponio doesn’t provide a general exponential function, nor a matrix data
structure, so we recommend to use
Eigen. In this case linear part is
diagonally so we can only use a std::valarray<double> as other
examples.
To keep \(L\) and \(N\) in a same object, Ponio provide a
ponio::lawson_problem:
state_t L = {alpha, -gamma};
auto N = [=]( double t, state_t const& un ) -> state_t {
double x = un[0], y = un[1];
return { -beta*x*y, delta*x*y };
};
auto pb = ponio::make_lawson_problem(L, N);
This problem pb can be use as a ponio::simple_problem or
ponio::problem. If we call ponio::solve with a
ponio::lawson_problem and a Lawson algorithm (same name as
Runge-Kutta algorithm but prefixed by l) Ponio applies a Lawson
method to solve the problem. Calling a Lawson algorithm neeed to provide
a exponential function, here we propose a solution with overloading of
exponential function for std::valarray.
auto exp = [](state_t const& x)->state_t { return std::exp(x); };
ponio::solve(pb, ponio::runge_kutta::lrk_44<>(exp), u_ini, {0.,tf}, dt, "lv_demo/lv1_lawson.dat"_fobs);
%system mkdir -p lotka_volterra_lawson_demo
[]
%%writefile lotka_volterra_lawson_demo/main.cpp
#include <iostream>
#include <valarray>
#include "ponio/solver.hpp"
#include "ponio/observer.hpp"
#include "ponio/problem.hpp"
#include "ponio/runge_kutta.hpp"
int main()
{
using state_t = std::valarray<double>;
using namespace ponio::observer;
double alpha = 2./3., beta=4./3., gamma=1., delta=1.;
state_t L = { alpha, -gamma };
auto N = [=]( double t, state_t const& u, state_t& du ) {
double x=u[0], y=u[1];
du[0] = -beta*x*y;
du[1] = delta*x*y;
};
auto pb = ponio::make_lawson_problem(L,N);
auto exp = [](state_t const& x)->state_t { return std::exp(x); };
double dt = 0.1;
double tf = 100;
state_t u_ini = {1.8,1.8};
ponio::solve(pb, ponio::runge_kutta::lrk_44(exp), u_ini, {0.,tf}, dt, "lotka_volterra_lawson_demo/lrk_44.dat"_fobs);
return 0;
}
Writing lotka_volterra_lawson_demo/main.cpp
%system $CXX -std=c++20 -I ../include lotka_volterra_lawson_demo/main.cpp -o lotka_volterra_lawson_demo/main
[]
%system ./lotka_volterra_lawson_demo/main
[]
import numpy as np
import matplotlib.pyplot as plt
data = np.loadtxt("lotka_volterra_lawson_demo/lrk_44.dat")
t = data[:,0]
x = data[:,1]
y = data[:,2]
plt.plot(t,x,label="prey")
plt.plot(t,y,label="predator")
plt.xlabel("time")
plt.legend()
plt.show()
Now define the invariant \(V\) :
def V(x,y, alpha=2./3., beta=4./3., gamma=1., delta=1.):
return delta*x - np.log(x) + beta*y - alpha*np.log(y)
V0 = V(x[0],y[0])
plt.plot(t,V(x,y)/V0-1.,label="LRK(4,4)")
plt.axhline(0,0,1,linestyle="--",color="grey",linewidth=1)
plt.title("Relative error on invariant $V$")
plt.xlabel("time")
plt.legend()
plt.show()